 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 行业资讯 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-12 10:00
什么是力量?在最基本的形式中,电源是在一定时间段内执行的操作。在电动机中,根据以下科学定律将电能转换并传递给负载。
在电气系统中,电压是移动电子所需的力。电流是每秒通过施加特定电压的材料的电荷流率。可以通过将电压乘以相关电流来确定功率。
P=V * I,其中功率(P)是瓦特,电压(V)是伏特,电流(I)是安培。
瓦特(W)是定义为每秒1焦耳的功率单位。对于直流电源,计算只需将电压乘以电流即可。 W=V xA。但是,要确定交流电源的功率(瓦),您需要包括功率因数(PF),因此W=V x A x PF。
功率因数是-1与1之间的无单位比率,表示在负载下执行任务的有功功率。在功率因数几乎总是小于1的情况下,有功功率会丢失。这是因为AC电路中的电压和电流本质上是正弦波,并且AC电路中的电流和电压的幅度不断变化,并且通常不完全对齐。
功率是电压乘以电流(P=V * I),因此并排放置电压和电流具有最高功率,从而导致电压和电流波形出现峰值和零点。同时。这是简单电阻负载的典型性能。在这种情况下,两个波形彼此“同相”,并且功率因数为1。这是一种罕见的情况,因为几乎所有负载都是完全非电阻性的。

当两个信号在点之间不相关时,这两个波形称为“异相”或“移相”。这可能是由感性或非线性负载引起的。在这种情况下,功率因数将小于1,并且将获得较少的有功功率。
交流电路的电流和电压可能会有波动,因此有几种测量功率的方法。
有功或有功功率是电路实际使用的功率量,以瓦特为单位。数字功率分析仪使用一种技术将输入电压和电流波形数字化,以根据图1中的方法计算实际功率。
在此示例中,瞬时电压乘以瞬时电流(I),然后在特定时间段(t)上积分。无论功率因数如何,都可以对任何类型的波形执行有功功率计算(图2)。
谐波会带来额外的复杂性。即使电网以标称60 Hz的频率运行,电路中也可能存在许多其他频率或谐波,并且可能还会有DC或DC分量。包括谐波在内的所有因素均被考虑并相加以计算总功率。
图2中的计算方法用于为所有类型的波形(包括直至仪器带宽的所有谐波)提供有功功率测量和实际RMS测量。
功率测量
接下来,我们研究如何实际测量给定电路中的功率。功率计是一种使用电压和电流来确定功率的工具。金发理论说,总功率至少应比电线数量少1瓦。例如,单相两线电路使用功率计进行电压和电流测量。
单相,三线分相系统通常出现在常规机柜接线中。这些系统需要两个功率计来测量功率。
大多数工业电动机使用三相三线电路,该电路使用两个瓦特表进行测量。同样,三相四线制电路需要三个功率计,而第四根线是零线。
此方法简化了安装和接线配置,因为它只需要监视2个电流和2个电压即可,而不是3个。它还可以准确地测量平衡或不平衡系统的功率。它的灵活性和廉价的安装使其成为仅需要测量功率或其他参数的生产测试的理想选择。
对于工程和研发工作,三相三线三功率计方法是最合适的。因为它提供了可用于平衡负载和确定实际功率因数的其他信息。此方法使用所有三个电压和所有三个电流。它测量所有三个电压(a到b,b到c,c到a)并监视所有三个电流。

功率因数测量
确定正弦波的功率因数时,功率因数等于电压和电流之间的夹角(Cos?)的余弦值。这被定义为“位移”功率因数,仅对正弦波准确。对于所有其他波形(非正弦波),功率因数定义为有功功率(以瓦特为单位)除以视在功率(以安培计)。这称为“真实”功率因数,可用于所有正弦波和非正弦波波形。
但是,如果负载不平衡(相电流不同),则在计算中仅使用2 VA的测量值,这可能导致功率因数计算中的误差。由于假设两个VA相等,因此我们将它们平均。但是,如果不这样做,可能会得到错误的结果。
因此,对于不平衡负载,最好使用3瓦特计法,因为它可以为平衡或不平衡负载提供准确的功率因数计算。
横河电机和其他功率分析仪使用上述方法,称为3V-3A(3电压3电流)接线方法。这是工程和设计工作的最佳方法,因为它可以为平衡或不平衡的三线系统提供准确的总功率因数和VA测量。
基本机械功率测量
在电动机中,机械功率定义为速度乘以转矩。机械功率通常定义为千瓦(kW)或马力(hp),1瓦等于每秒1焦耳或每秒1牛顿米。
马力是每小时执行一次的操作。一匹马力每分钟等于33,000磅-英尺。使用以下关系式将马力转换为瓦: 1马力=745.69987W。但是,通常使用746W/hp简化转换。
对于交流感应电动机,实际或转子速度是轴(转子)旋转的速度,通常使用转速表进行测量。同步速度是定子磁场旋转的速度,是线频的120倍除以电动机中的极数。理论上,同步速度是电动机的最大速度,但是由于损耗,转子始终以比同步速度稍慢的速度旋转,该速度差定义为滑差。
滑差是转子速度和同步速度之间的差。要确定滑移率,可以使用简单的百分比计算除以同步速度减去转子速度。
效率可以用最简单的形式表示:输出功率与总输入功率之比,或者效率=输出功率/输入功率。对于电动机,输出功率是机械功率,输入功率是功率,因此效率方程变为效率=机械功率/电气输入功率。
强大的电动机
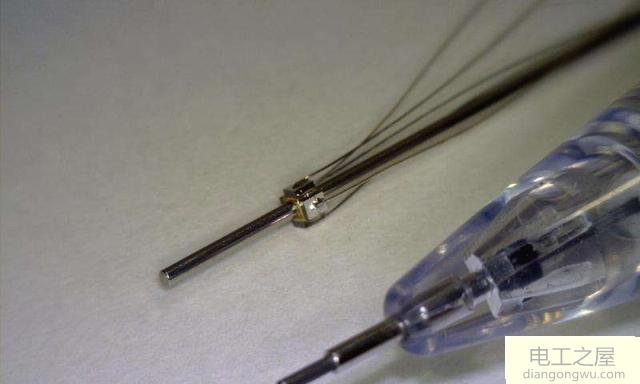
压电超声电机具有两个重要的优点:高能量密度和简单的结构,两者都有助于实现小型化。我们使用体积约为1立方毫米的定子制造了原型微超声电机。我们的实验表明,在1立方毫米的定子中,原型电机产生的扭矩大于10μNm。现在,这种新型电动机是最小的超紧凑型超声波电动机,并且已经开发出实用的扭矩。
从移动和可穿戴设备到微创医疗设备,各种各样的应用都需要小型执行器。但是,与制造相关的限制限制了1mm规模的部署。最普通的电磁电动机被小型化并且需要许多复杂的组件(例如线圈,磁体和轴承),以由于污染而表现出严重的扭矩耗散。静电马达使用微机电系统(MEMS)技术来实现出色的可伸缩性,但动力不足会限制其进一步发展。
压电超声电机由于其高扭矩密度和简单的组件而有望成为高性能的微型电机。迄今为止报道的最小的常规超声马达具有直径为0.25 mm,长度为1 mm的金属零件。但是,包括预紧机构在内的整体尺寸为2-3mm,扭矩值太小(47nNm),无法在许多应用中用作致动器。
结论
在测量电动机的功率时,必须考虑许多因素,例如总功率因数和实际功率因数。由于这些测量涉及复杂的方程式,因此大多数企业使用功率分析仪自动生成结果。
在决定使用功率分析仪之后,您需要确定频率范围和精度等级。仪器兼容性是确保准确读数的另一个重要方面,特别是对于电流互感器而言,应考虑分析仪的输入/选项。给定正确的传感器输入,功率分析仪也可以用于机械功率测量。选择合适的速度和扭矩传感器是确定机械功率的第一步。
相关推荐
在线留言




