 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 企业新闻 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-08 17:00
伺服系统(伺服机构)是一种自动控制系统,它使对象的位置,方向,状态等的输出控制量跟随输入目标(或给定值)的任意变化。
今天让我们讨论一下伺服电机如何实现精确定位以及如何理解闭环特性。首先,让我们看一下由伺服驱动器和伺服电动机组成的AC伺服系统的配置。在这里,我们主要讨论伺服驱动器的工作原理。电机只是执行器。驱动器的结构图与逆变器主电路相似,对电源进行整流和反向,以实现交流→直流→交流转换。
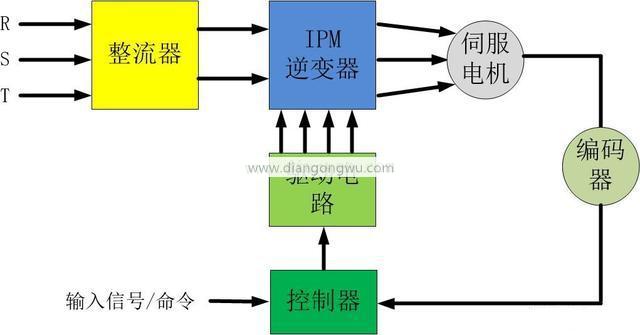
伺服驱动器结构简化图
输入信号/命令可以是位置,速度,转矩和其他控制信号,它们对应于伺服电机的三种控制模式,每种控制模式对应于回路控制,转矩控制当前为闭环控制,速度模式为速度闭环控制,并且位置模式是三种闭环控制模式(转矩,速度,位置)。下面我们将分析位置模式的三个闭环。
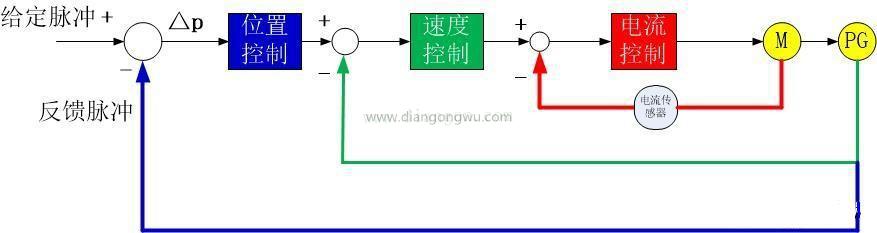
3种位置模式的闭环控制
在上图中,M是伺服电动机,PG是编码器,最外面的蓝色是位置环。最终,您可以控制位置(定位),并且内部回路是速度回路和电流回路。 (转矩回路)。在位置模式下,速度回路和电流回路用作失速控制和保护回路,以防止过载,以确保电动机以恒定速度运行并且电动机电流恒定。重点是定位环如何使电动机精确地旋转给定角度。
如果给定1个脉冲,则反馈脉冲为0,并且将脉冲偏差作为△p=1输入到控制器。这时,驱动电路控制IPM逆变器生成SPWM波来驱动伺服。电机旋转,注意此SPWM波与我们的PLC脉冲的方波不同。当电机驱动编码器旋转时,它会发送一个反馈脉冲,此时△p=0,电机停止输出,并且完成了1脉冲定位。从发送脉冲到接收反馈脉冲的整个过程都是一个闭环过程,用于检查电动机的精确位置。脉冲数确定定位距离,脉冲频率确定电动机的速度。
相关推荐
在线留言




