 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 行业资讯 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-09 15:00
1.步距角和静态步距误差
< p>步进角与步进电动机的相数,通电方法以及电动机转子的齿数之间的关系如下。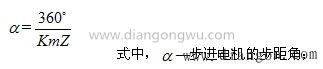
m-电机相数
Z-转子齿数
K因子,相邻两个导电相的数目相同,K=1;相邻两个导电相的数量不同,K=2。
具有相同相数的步进电动机通常可以具有2个步进角:1.2/0.6、1.5/0.75、1.8/0.9、3/1.5度。步距误差是指步进电机运行时,转子在每个步距处的实际旋转角度与理论步距角之间的差。当您连续执行多个步骤时,上述步骤的累积值称为该步骤的累积误差。步进电机旋转一圈后,将重复前一圈的稳定位置。换句话说,步进电机的步进累积误差以1旋转的周期重复出现。步进误差主要是由于步进电动机的制造误差,定子和转子之间的气隙不均匀以及角相的电磁转矩不均匀引起的。
2.静态转矩与矩角特性
在对步进电机的定子绕组的特定相通电时,转子齿与定子齿对齐以使磁路的磁阻最小,并且转子处于平衡位置(θ=0)。当负载转矩M施加到电机轴上时,转子移出平衡位置,并沿负载转矩方向旋转角度θ。角度θ称为未对准角度。在偏移角度之后,步进电机会产生静态转矩(也称为电磁转矩),并且该静态转矩等于负载转矩。静态转矩和偏置角θ之间的关系称为力矩角特性,近似于正弦曲线,如图4-42所示。力矩角特性的最大静态扭矩称为最大静态扭矩。当外部负载扭矩从静态稳定区域移开时,转子仍可以在电磁扭矩的作用下返回其稳定的平衡位置(θ=0)。
相关推荐
在线留言




