 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 行业资讯 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-09 17:00
1 Delta伺服实现伺服电动机正向和反向旋转的方式取决于用于控制伺服电动机运行的伺服驱动器的模式。如果是调试,则很容易做到。以ASDA-B2系列为例。首先,将P2-30设置为1以强制启动伺服。调整P4-05以调整电动机速度并进入JOG模式。按向上和向下键开始正向和反向旋转,此方法是最简单的调试,不需要连接控制线。

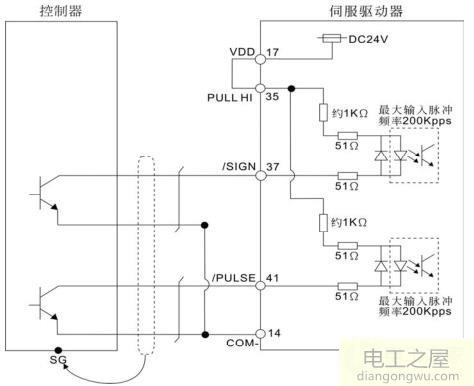
位置模式是伺服驱动器最常见的控制模式。电机使用脉冲+方向格式驱动。在此,脉冲数表示电动机的旋转(位移)以及脉冲频率。它代表电动机的速度,其方向为正反转。输出方向信号时,电动机向正方向旋转,不输出方向信号时,电动机反转。在这种方法中,您需要通过连接控制线(例如脉冲控制器(例如PLC))来发送脉冲。如下图所示,有脉冲信号PLUSE和方向信号SIGN。将驱动模式更改为位置模式P1-。 1到00。
速度模式是驱动器经常使用的控制模式。可以通过模拟量进行调节,类似于逆变器的速度调节。模拟信号的范围是-10v至+ 10v。值表示速度的速度,符号表示作为模拟输入-5v信号的旋转方向,驱动器控制伺服电机沿与最大速度大致相反的方向旋转,速度模式为P1-1。参数更改为02。
相关推荐
在线留言




