 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 行业资讯 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2022-02-11 09:57
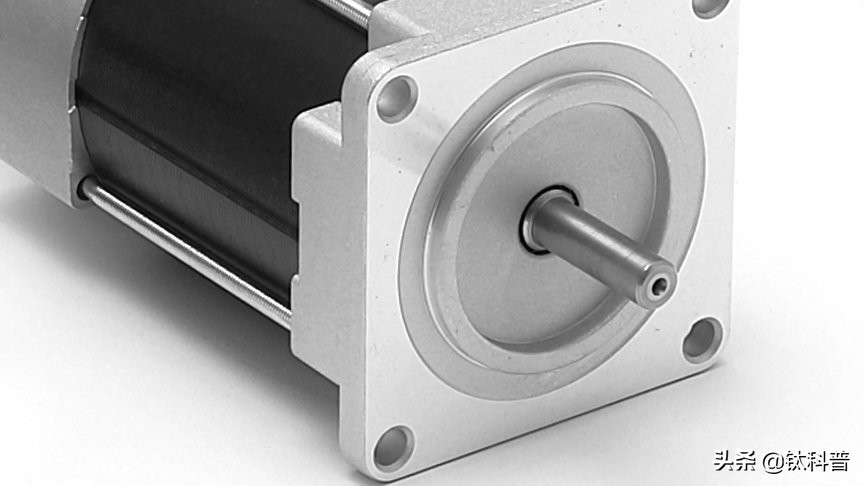
通用电机主要用作设备连续旋转的动力源。相反,装有控制机构的伺服电机只能以固定的角度旋转,并停在精确的位置。利用这一特性,伺服电机被广泛应用于工业和爱好领域的各种设备控制场景,从工业机器人的联合定位到确定无线电控制飞机的方向舵角度。
伺服电机的定义
伺服电机的伺服是指控制机构。在科技领域,被控方称为主控方,被控方称为从控方。据说Servus和slave都来源于拉丁奴隶。
也就是说,伺服电机这个名字是指按照指令忠实工作的电机。只要能控制旋转位置和速度,无论什么机构,电机都叫伺服电机。
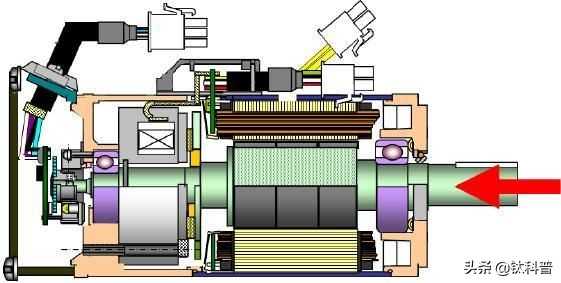
因此,有时步进电机和无芯电机包含在伺服电机中。在这里,我们解释配有编码器(旋转检测器)的伺服电机的类型,并根据这些信息使用驱动器来控制速度和位置(角度)。
伺服电机与步进电机的区别
步进电机和伺服电机一样,都装有通过接收外部信号来控制旋转角度的机构。它们都可以执行设备定位等操作,但它们有以下区别。
1.控制方式
伺服电机通过编码器(旋转检测器)检测旋转位置,并将编码器检测到的信息反馈给控制器以控制位置。因此,可以实现高精度停止,即使在旋转期间停止,如果位置偏离,也可以返回到原始位置。另一方面,步进电机的旋转角度与脉冲数成正比,驱动器通过从控制器接收该脉冲信号来控制位置。因此,实际上,它不需要一个机制来检测位置,所以它不能识别位置偏差。因此,由于意外的负载波动和其他原因,可能会出现失步(指示的旋转角度与电机旋转不同步)。
伺服电机
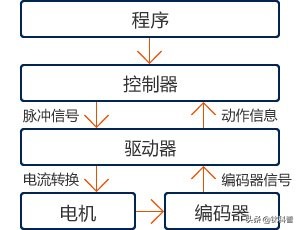
程序控制器(脉冲信号)驱动器(电流转换)电机编码器(编码器信号)驱动器(动作信息)控制器
步进电机

程序控制器(脉冲信号)驱动器(电流转换)电机
2.扭矩/转速
伺服电机在低速和高速区域都能产生稳定的扭矩,因此可以实现高速运行。步进电机只能在低速区域产生较高的转矩,而在高速区域转矩下降,不适合高速旋转。
3.成本
伺服电机比步进电机成本更高,因为它需要使用昂贵的旋转编码器和伺服控制装置(伺服驱动器)。
4.加速性能
步进电机从静止加速到工作速度(通常每分钟几百转)需要200 ~ 400毫秒。交流伺服系统加速性能好,从静止加速到其额定转速3000RPM仅需几毫秒,可用于需要快速启停的控制场合。
伺服电机的历史
伺服电机技术随着工业机器人的进步
而有显著发展。美国从20世纪50年代起重视工厂的自动化,并开始了以皮带输送机、自动化装置、工业机器人等为代表的自动化进程。初期的自动化装置和工业机器人的执行器使用液压和气压定位,存在精度、使用的稳定性、管线、漏油漏气等课题。
之后,随着20世纪50〜60年代DC伺服电机技术不断发展,实用性不断提高,它开始用于工业机器人,以替代存在问题的液压和气压机构。
到了20世纪80年代,出现了AC伺服电机,机器人有了追求更小更轻的趋势等,AC伺服电机因其较高的实用性,现如今几乎应用在所有工业领域的设备类产品上。
伺服电机的类型
伺服电机可以分为DC伺服电机和AC伺服电机两类。
DC伺服电机
由带刷DC(直流)电机驱动的伺服电机。DC电机比AC电机容易控制,且体积小、价格低,因此以前广泛使用,但是随着AC电机控制技术的发展,现在使用的机会越来越少了。
AC伺服电机
由AC(交流)电机驱动的伺服电机。其控制比DC电机复杂,但是随着控制技术的发展,现在已经是使用最普遍的伺服电机了。
AC伺服电机按照驱动电机的类型可以分为同步(SM)型和感应(IM)型两类。两者的区别在于是否使用永磁体。
同步(SM)型使用永磁体。电机输出功率越大,昂贵永磁体的使用量也越多,所以成本较高。因此,多用于输出功率较小的领域(不足10kW),现如今随着高性能永磁体的出现,同步型也就成了主流产品。
感应(IM)型不使用永磁体,用于输出功率较大的领域(10kW以上)。
伺服电机的用途
伺服电机的优势是精确的定位控制,因此广泛应用于工业机器人和精密机械的控制。
/工业机器人的关节
/人形(类人)机器人的关节
/食品机械的控制装置
/包装机械的控制装置
/输送装置的皮带机构
/电动车辆等的自动门
/液晶和半导体的检查装置等的X-Y工作台
/冲压和辊式给料机
/机床和检查装置的旋转工作台
/压力装置的控制
/邦定装置的控制
/树脂成型机的控制
/娱乐设备的控制
/无线电控制等业余爱好的用途
/涂层和气相沉积装置
/液晶和半导体的旋转式清洗装置
结语:
综上所述,交流伺服系统在许多性能方面都优于步进电机。但在一些要求不高的场合也经常用步进电机来做执行电动机。所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。
相关推荐
在线留言




