 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 企业新闻 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-11 10:00
步进电机基本上由用于位置控制的开环电路驱动。即,步进马达以外的马达,特别是高精度的步进马达不具有开环控制位置,由开环电路驱动的马达仅是步进马达。例如,在无刷电动机中,首先是切换相位,需要测量转子位置,并且需要带有位置传感器的位置闭环电路。如果以一定速度驱动,则需要测量转子的速度,这是一个速度闭环电路。如果需要位置控制,则需要一个闭环电路,该电路应带有编码器之类的传感器,其中包括:转子位置信号。与开环驱动步进电机相比,带有传感器的闭环电路具有更高的成本。因此,步进电机被称为用于速度控制或位置控制的低成本驱动系统。
当步进电动机的开环电路高速旋转时,会出现诸如失去同步,振动(噪音)和高速操作困难等问题。为了弥补这些缺点,步进电机配备了一个角度传感器,形成了一个闭环控制,可以检测并防止步进偏差。步进电机的闭环控制方法主要有两种类型。
通过保持磁通量和电流之间的相位关系一致,可以产生电磁转矩来驱动负载转矩,该电动机电流控制方法与无刷直流电动机控制方法相同。驱动模式或电流闭环控制方法。电动机电流保持恒定,并且控制励磁磁通和电流之间的相角的方法称为功率角闭环控制方法。功率角是由转子磁极与定子励磁相位(或同步电动机的定子旋转磁场的轴)之间的相互吸引所形成的相位角。该功率角在低速或轻负载下较小,而在高速或高负载下较大。从上一篇文章中的开环控制原理可以看到下图。 “ bar A”相吸引转子磁极,“ bar B”相以π/2的角度励磁,并且转子位于“ bar A”相的前边缘(在图中,S转子的磁极为A相。在左侧时,刺激“ B条”相开始被激励。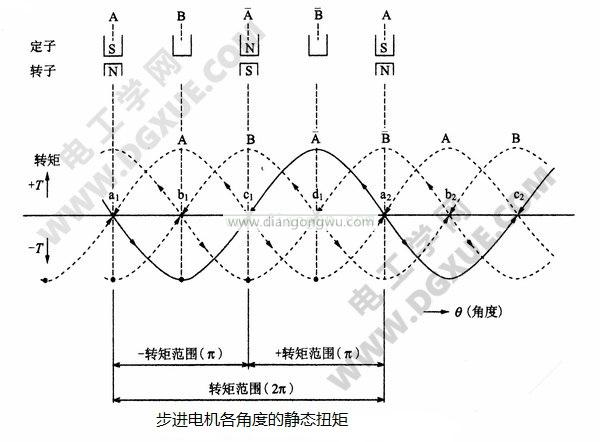 为什么?在高速情况下,由于线圈电感的影响,A相电流的关断时间变长,B相电流的上升时间也变长,因此产生最大转矩的角度和速度越高。加速度,该值越高。
为什么?在高速情况下,由于线圈电感的影响,A相电流的关断时间变长,B相电流的上升时间也变长,因此产生最大转矩的角度和速度越高。加速度,该值越高。 相关推荐
在线留言




