 咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220
咨询电话: 187-1797-6220

— 企业新闻 —
大中电机欢迎您 全国免费客服电话 187-1797-6220
全国免费客服电话 187-1797-6220
地址:上海市松江区莘砖公路399弄
电话:021-6992-5088
手机:187-1797-6220 朱经理
邮箱:18717976220@163.com
发布时间:2021-03-24 16:01
伺服电机是控制伺服系统中机械元件运行的发动机,是辅助电机的间接变速装置。伺服电机可以精确控制速度和位置,并将电压信号转换成扭矩和转速来驱动被控对象。伺服电机转子速度由输入信号控制,并能快速响应。在自动控制系统中,它作为执行机构,具有机电时间常数小、线性度高、启动电压低等特点。它可以将接收到的电信号转换成电机轴上的角位移或角速度并输出。它分为两类:DC伺服电机和交流伺服电机。它的主要特点是信号电压为零时,没有旋转现象,转速随着扭矩的增加而匀速下降。

什么是伺服电机?

伺服电机又称执行电机,它将输入电压信号转换成转轴的角位移或角速度。改变输入信号的大小和极性可以改变伺服电机的速度和转向,输入电压信号也称为控制信号或控制电压。

伺服电机种类繁多,应用广泛。例如,在雷达天线系统中,雷达天线由交流伺服电机驱动。当天线发射的无线电波遇到目标时,会被反射并发送给雷达接收机;雷达接收机确定目标方位和距离后,向交流伺服电机发出电信号,交流伺服电机根据电信号驱动雷达天线跟踪目标。

伺服电机根据电源的不同分为DC伺服电机和交流伺服电机。DC伺服电机输出功率大,功率范围1 ~ 600瓦,有的甚至达到千瓦;但交流伺服电机输出功率较小,功率范围一般为0.1 ~ 100瓦。

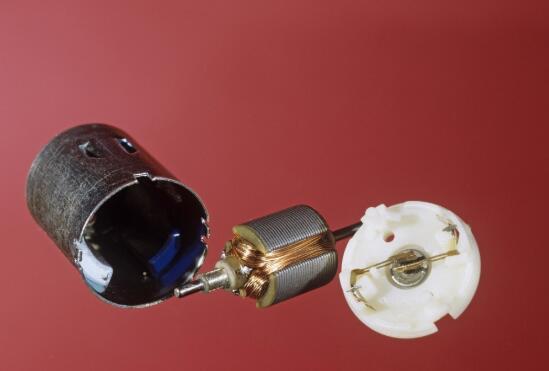
伺服电机内部结构

伺服电机可以精确控制速度和位置,并将电压信号转换成扭矩和转速来驱动被控对象。伺服电机转子速度由输入信号控制,并能快速响应。在自动控制系统中,它作为执行机构,具有机电时间常数小、线性度高、启动电压低等特点。它可以将接收到的电信号转换成电机轴上的角位移或角速度并输出。它分为两类:DC伺服电机和交流伺服电机。它的主要特点是信号电压为零时,没有旋转现象,转速随着扭矩的增加而匀速下降。
伺服电机的工作原理

1.伺服机构是一种自动控制系统,它使输出控制量如物体的位置、方向和状态跟随输入目标(或给定值)的任意变化。伺服主要靠脉冲定位。基本上可以理解为伺服电机接收到脉冲时,会旋转一个与脉冲对应的角度,从而实现位移。由于伺服电机本身具有发送脉冲的功能,所以伺服电机每旋转一个角度就会发出相应数量的脉冲,与伺服电机接收到的脉冲相呼应,或者称为闭环。这样,系统将知道有多少脉冲被发送到伺服电机,同时又有多少脉冲被接收回来。DC伺服电机分为有刷电机和无刷电机。无刷电机成本低,结构简单,起动转矩大,调速范围宽,容易控制,需要维护,但维护(换碳刷)不方便,产生电磁干扰,对环境有要求。因此,它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小、重量轻、输出大、响应快、速度快、惯性小、转动平稳、扭矩稳定。控制复杂,容易实现智能化。其电子换向方式灵活,可以是方波换向,也可以是正弦波换向。该电机免维护,效率高,工作温度低,电磁辐射低,使用寿命长,可用于各种环境。
2.交流伺服电机也是无刷电机,分为同步电机和异步电机。目前运动控制一般采用同步电机,功率范围大,可以实现大功率。惯性大,最大转速低,随功率增加迅速下降。所以适合低速稳定运行。
3.伺服电机内部的转子是永磁体。驱动器控制的U/V/W三相电形成电磁场,转子在这个磁场的作用下旋转。同时,电机的编码器将信号反馈给驱动器,驱动器将反馈值与目标值进行比较,以调整转子的旋转角度。伺服电机的精度取决于编码器的精度(行数)。
交流伺服电机和无刷DC伺服电机的功能区别:交流伺服更好,因为是正弦波控制,所以转矩脉动小。DC伺服是梯形波。但是DC伺服简单又便宜。
43px;" />
伺服可作为交流或直流电动机。早期一般伺服直流电动机,因为只有类型的控制大电流是通过序列多年。随着晶体管成为能够控制大电流和开关的大电流在更高的频率,交流伺服电机成为更经常地使用。早期伺服是专为伺服放大器。今天,一类是电机设计的应用,筹措,可能使用伺服放大器或变频控制器,这意味着电动机可用于伺服系统在一个应用程序,并使用变频驱动器在另一应用程序。有些公司还要求任何闭环系统,不使用步进电机伺服系统,所以它是可能的一个简单的交流感应电机是连接到一个速度控制器,被称为伺服电机。
有些变化,必须作出任何运动,目的是作为伺服在cludes的能力,运作了一系列的速度没有过热,运作的能力在零速度和保持足够的转矩举行负荷的立场,运作能力在非常低的速度很长时间没有过热。老年型发动机冷却风扇已是直接连接到电机轴。当电机运行速度缓慢,风扇不会移动足够的空气冷却的发动机。较新的发动机有一个单独的风机安装,以便将提供最佳的冷却空气。这扇是由常数电压源,以便它反过来将在最大转速在任何时候都不管的速度伺服。其中最实用类型的电机伺服系统是永久磁铁(下午)型发动机。电压为外地绕组永磁型电机可以交流电压或直流电压。永磁型电机类似于其他类型电机下午以前提出。图11-83显示了剖图片的永磁电机和图。 11-84显示了剖图的永磁电机。从图片和图表可以看到住房,转子和定子都期待非常相似,前型永磁电动机。主要的差异这种类型的发动机,它可能减少齿轮能够将更大的负荷迅速从一个站着不动的位置。这种类型的永磁电机也有一个编码器或解析器内置马达的住房。这确保了设备将准确地表明了立场或速度的电机轴。
无刷伺服无刷伺服电机的目的是开展活动,刷子。这意味着,减刑的刷子提供现在必须以电子方式提供。电子减刑是由开关晶体管和关闭在适当时候。图11-85表明三个例子的电压和电流波形发送到无刷伺服电机。图11-86显示一个例子,这三个绕组的无刷伺服电机。主要的一点无刷servomo因子是,它可以采用任何交流电压或直流电压。
图11-85显示三种类型的电压波形,可用于功率无刷伺服电机。图11 - 85a显示了梯形电动势(电压)输入和方波电流输入。图11 - 85b显示波形的正弦输入电压和方波电流波形。图11 - 85C号显示了正弦输入波形和正弦电流波形。正弦输入和正弦电流波形是最受欢迎的电压用品的无刷伺服电机。
图11-86表明三套晶体管类似的晶体管输出级的变频驱动器。在图。11-86a晶体管相连的三个绕组电机以同样的方式在变频驱动器。在图。一升-86b图的波形的输出晶体管表现为三个不同的正弦波。波形的控制电路为基础,每一个transis器中显示图。11-86c。图11-86d表明了反电势的驱动波形。
图11-85 (a)陷阱ezoidal输入电压和方波电流波的形式。(b)正弦输入电压和正弦电压和方波输出电压波的形式。(c)正弦输入电压和sinusoi达电流波形。这已成为最流行的类型的无刷伺服控制。
伺服控制器
伺服控制器已成为不仅仅是放大器的伺服电机。今天,伺服控制器必须能够作出了一系列决定,并提供一种手段,接收信号来自外部传感器和控制系统中,并发出信号,主机控制器和PLC的接口,可能与伺服系统。图11-87显示了图片的几个伺服电机和放大器。各组成部分在这个图片看起来类似的各种其他类型的电机和控制器。
图11-88显示了图伺服控制器,以便您可以看到一些分歧与其他类型的电机控制器。该控制器在此图是直流伺服电机。该控制器有三个港口,使信号或发送信号的控制器。电源供应器,伺服电机,和转速表连接到端口P3底部的控制器。你可以看到,电源电压为115伏单相交流。一个主要的断开连接的一系列与李线。在李和N线路供电的隔离降压变压器。二次电压跨前可以是任何电压的20和85伏特。该控制器接地端8 。你应该记住,地面在这一点上是用来提供短路保护所有金属部件的系统。
该伺服电机连接到终端控制器在第4和第5 。终端5 +和终端4 -。 3号候机楼提供了地面的屏蔽的连接线,电机和控制器。在转速表连接到终端1和2 。 2号候机楼是+和终点站1 -。在此盾构电缆接地电动机案件。电线连接到这个港口将大于导线连接到其他港口,因为它们必须能够携带更大的电机电流。如果电动机采用了外置散热风扇,这将是连接通过这个港口。在大多数情况下,冷却风扇将采用单相或三相交流电压保持在恒定的水平,如110伏或240伏。
图11-86 (a)sistors连接到三个绕组的无刷伺服电机。(b)波形的三个独立的电压,用于功率电机的三个风消息。(c)波形的信号用来控制晶体管序列,提供了波形图前,(d)波形的整体反电势。
图11-88图的伺服控制器。此图显示的数字(开关)信号和模拟信号发送到控制器,以及信号控制器传送回主机控制器或PLC 。
该命令的信号被送到控制器通过港口。该终端的指挥信号的1和2 。 1号候机楼是+和终端2 -。这种信号是一种信号,这意味着它不是停飞或不同意的理由可能同任何其他部分的电路。一些额外的辅助信号也通过端口连接1 。这些信号包括抑制(异烟肼) ,这是用来停用驾驶从外部控制器,并正向和反向的命令(刚果和吸波涂层) ,其中向控制器发出电压电机,使之将在旋转向前或扭转方向化。在某些应用中,最大的旅行着限位开关和反向最大的旅行限位开关连接,如果旅行的机器动作的极端位置,以便它触及了overtravel限位开关,它会自动激发干劲,开始旅行相反的方向发展。
港口还提供了几个数字输出信号,可以用来发送故障信号或其他信息,如“驱动器运行”回到主控制器或PLC。港口基本上是界面的全数字化(开关)信号。
港口的P2是界面的模拟( 0 -最大值)的信号。典型的信号,这车包括电机电流和电机速度信号,传送至伺服控制器到主机或公司,在这里他们可以用来验证逻辑,以确保控制器发出正确的信息的马达。输入信号从主机或PLC还可以被发送到控制器设置最大电流和速度的驱动器。在新的数字驱动器,这些值控制的驱动器参数,编程到驱动器。
相关推荐
在线留言




